Optimization
Using programming languages to solve optimization problems
April 9, 2025
Lecture Summary
- Optimization
- Analytic
- Programmatic
- Symbolic
- Numeric
- Grid Search
- Gradient-free
- Gradient-based
- Automatic Differentiation
Quantecon
https://quantecon.org/lectures/
A super useful resource for learning about quantitative methods for solving economic models.
most lectures using Python, some using Julia
macro / finance focus
also a package of useful functions for Python and Julia
Optimization
Common Classes of Optimization Problems
Linear Programming (LP)
Quadratic Programing (QP)
Non-linear Programming (NLP)
There are efficient numerical methods for LP and some QP problems.
NLP problems are much harder.
R Packages for Each Class
- LP:
lpSolve - QP:
quadprog - NLP:
nloptr
We will be using nloptr today.
Numerical Optimization
Basic Macro Example
Let’s take a three equation macro model (with no stochastic shocks and no expectations). The Central Bank wants to minimize the loss function:
\[ i_t = \min_{i_t} \left( \pi_t - \pi^* \right)^2 \\ \pi_t = \kappa y_t \\ y_t = \chi i_t \]
Substituting in the Phillips curve and the IS curve, we have:
\[ i_t = \min_{i_t} \left( \kappa \chi i_t - \pi^* \right)^2 \]
Basic Macro Example
We know the FOC:
\[ \frac{\partial \mathbb{L}}{\partial i_t} = 0 = 2 \kappa \chi \left( \kappa \chi i_t - \pi^* \right) \\ i^* = \frac{1}{\kappa \chi} \pi^* \]
Which we can use to find the optimal interst rate for given values of \(\kappa\), \(\chi\), and \(\pi^*\).
If \(\kappa = 0.5\), \(\chi = 0.5\), and \(\pi^* = 2\), then: \[ i^* = \frac{1}{0.5 \cdot 0.5} \cdot 2 = 8 \]
Numerical Methods
This is a basic square-loss problem, but what if we could not use analytic methods?
Let’s look at some numerical methods that are available.
- Grid Search
- Gradient-free methods
- Gradient-based methods
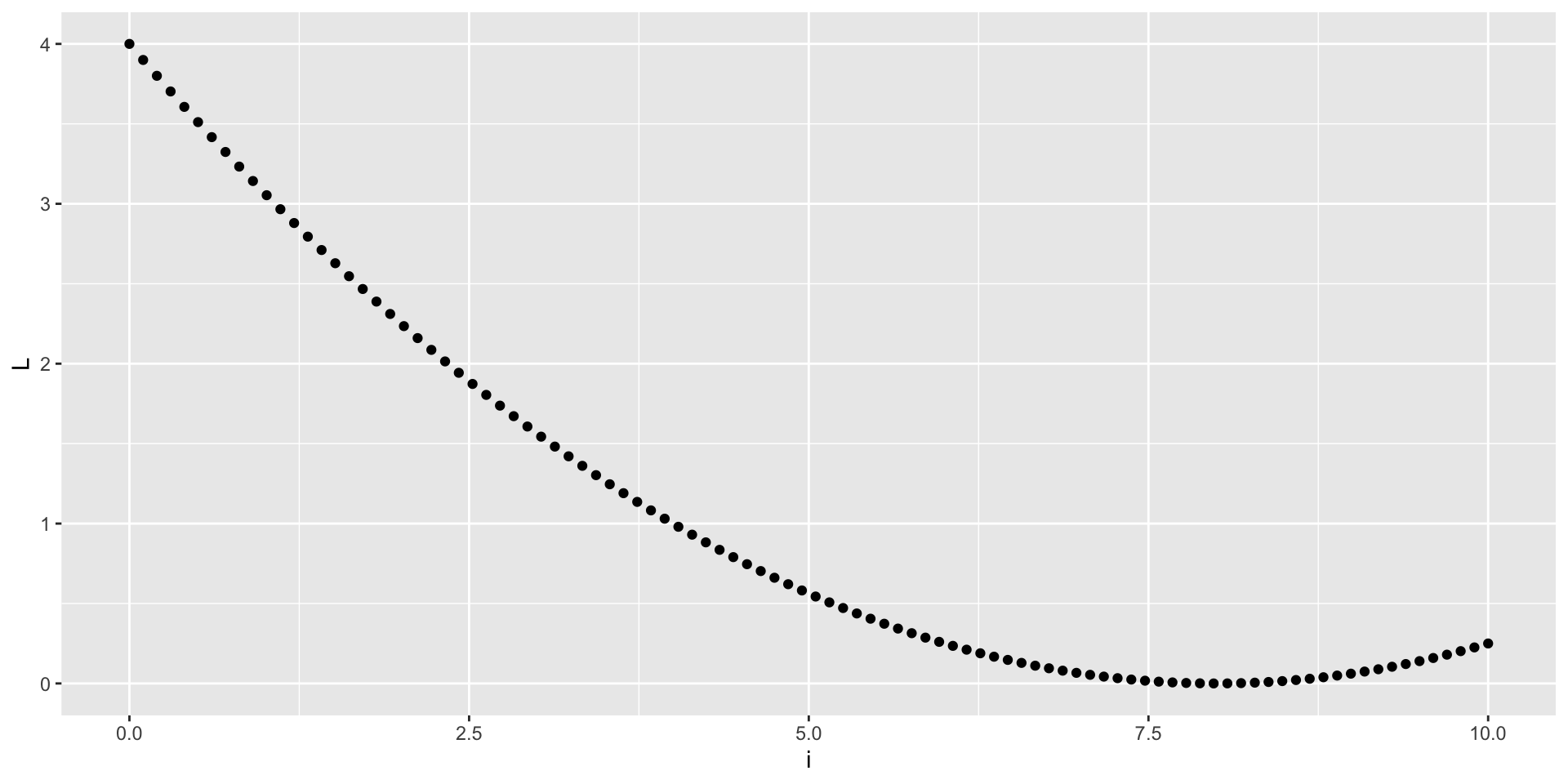
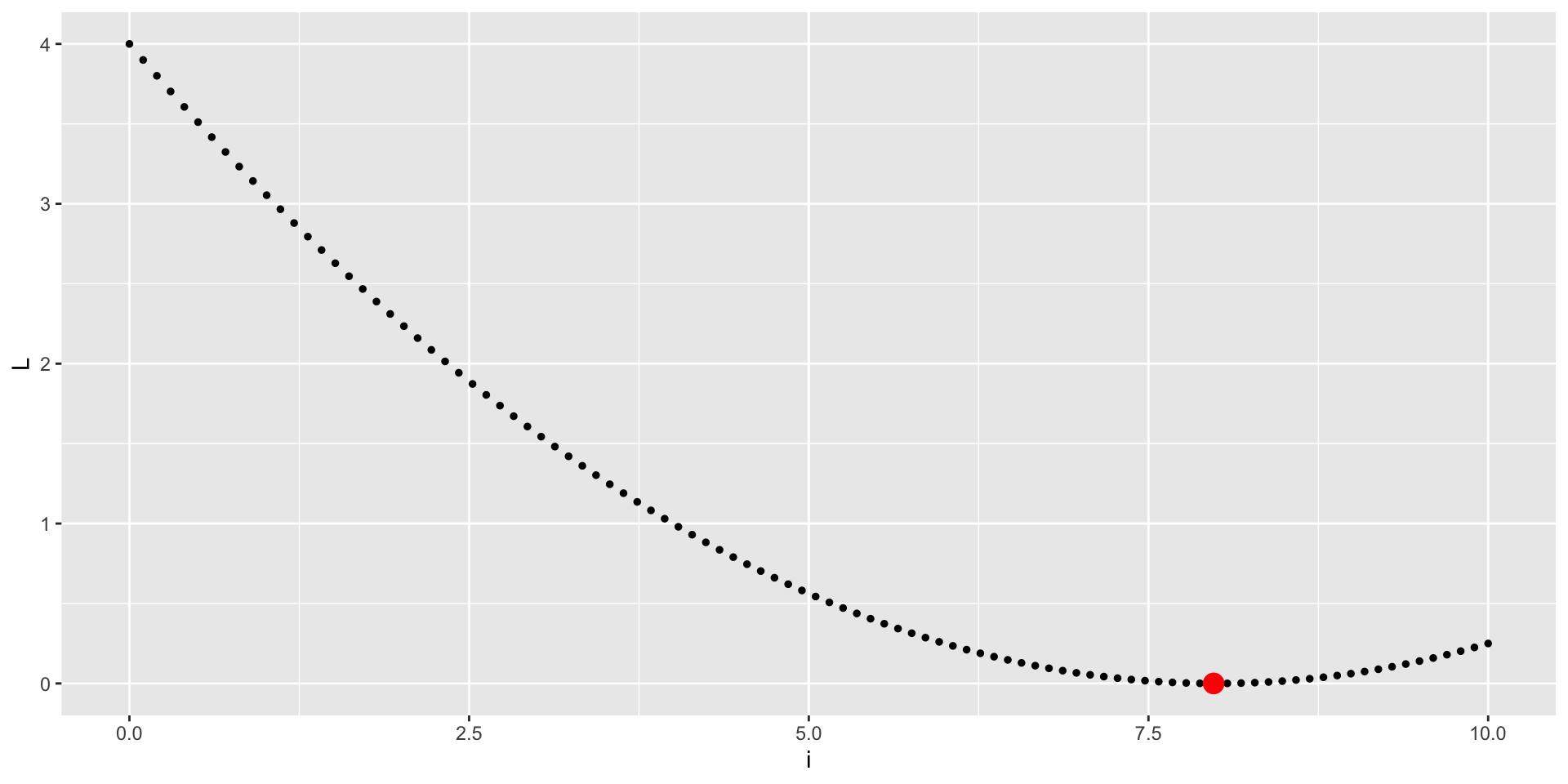
Grid Search
A grid search is a brute force method of searching for the optimal solution.
- Define a grid of values for the variable of interest (in this case, \(i_t\))
- Evaluate the loss function at each point in the grid
- Find the point with the minimum value of the loss function
- This is a very simple method, but it can be computationally expensive for large grids
Grid Search
Grid Search
Gradient-free Methods
Gradient-free methods are useful when the loss function is not differentiable or when the gradient is difficult to compute.
One possible method is the Nelder-Mead method, which is a simplex-based optimization algorithm.
In general, gradient-free methods are less efficient than gradient-based methods.
Nonlinear Optimization in R: nloptr
nloptr is a package for nonlinear optimization and implements multiple methods.
Nelder-Mead Algorithm
The Nelder-Mead algorithm is a simplex-based optimization algorithm.
- Construct a simplex of n+1 points in n-dimensional space
- Evaluate the loss function at each point in the simplex
- Reflect, expand, or contract the simplex based on the function values
- Iterate until convergence
Nelder-Mead Method
Gradient-based Methods
Gradient-based methods are more efficient than gradient-free methods, but they require the loss function to be differentiable.
One of the simplest gradient methods is Newton’s Method for optimization.
Newton’s Method for Optimization
Optimizes a function \(f(x)\) by finding roots for \(f^\prime(x)=0\).
- Start with an initial guess \(x_0\)
- Compute the gradient \(f^\prime(x_0)\)
- Compute the Hessian \(f^{\prime\prime}(x_0)\)
- Update the guess \(x_1 = x_0 - \frac{f\prime(x_0)}{f\prime\prime(x_0)}\)
- Repeat until convergence
Some Restriction of Newton’s Method
- Requires kndowledge of the gradient
- Requires the Hessian to exist and be invertible
Quasi-Newton methods are a class of methods that approximate the Hessian.
- BFGS is a popular quasi-Newton method that approximates the Hessian with changes in the gradient
- Truncated Newton Method also approximates the Hessian
Truncated Newton’s Method
Numerical Gradient
Instead of computing the gradient analytically, we can use a numerical approximation.
This approximates the gradient using finite differences.
\[ f^\prime(x) \approx \frac{f(x + h) - f(x - h)}{2h} \]
where \(h\) is small.
Truncated Newton’s Method, numerical gradient
Tracking the Iterations
It can be confusing to understand what is happening in the optimization process.
We can tell nloptr to save the intermediate values of the optimization process.
opts <- list(
"algorithm" = "NLOPT_LN_NELDERMEAD",
"xtol_rel" = 0.0001,
"maxeval" = 100,
"print_level" = 3
)
nloptr(x0 = 0, eval_f = L, opts = opts)iteration: 1
x = 0.000000
f(x) = 4.000000
iteration: 2
x = 1.000000
f(x) = 3.062500
iteration: 3
x = 2.000000
f(x) = 2.250000
iteration: 4
x = 3.000000
f(x) = 1.562500
iteration: 5
x = 5.000000
f(x) = 0.562500
iteration: 6
x = 7.000000
f(x) = 0.062500
iteration: 7
x = 11.000000
f(x) = 0.562500
iteration: 8
x = 9.000000
f(x) = 0.062500
iteration: 9
x = 11.000000
f(x) = 0.562500
iteration: 10
x = 8.000000
f(x) = 0.000000
iteration: 11
x = 7.000000
f(x) = 0.062500
iteration: 12
x = 8.500000
f(x) = 0.015625
iteration: 13
x = 7.500000
f(x) = 0.015625
iteration: 14
x = 8.250000
f(x) = 0.003906
iteration: 15
x = 7.750000
f(x) = 0.003906
iteration: 16
x = 8.125000
f(x) = 0.000977
iteration: 17
x = 7.875000
f(x) = 0.000977
iteration: 18
x = 8.062500
f(x) = 0.000244
iteration: 19
x = 7.937500
f(x) = 0.000244
iteration: 20
x = 8.031250
f(x) = 0.000061
iteration: 21
x = 7.968750
f(x) = 0.000061
iteration: 22
x = 8.015625
f(x) = 0.000015
iteration: 23
x = 7.984375
f(x) = 0.000015
iteration: 24
x = 8.007812
f(x) = 0.000004
iteration: 25
x = 7.992188
f(x) = 0.000004
iteration: 26
x = 8.003906
f(x) = 0.000001
iteration: 27
x = 7.996094
f(x) = 0.000001
iteration: 28
x = 8.001953
f(x) = 0.000000
iteration: 29
x = 7.998047
f(x) = 0.000000
iteration: 30
x = 8.000977
f(x) = 0.000000
iteration: 31
x = 7.999023
f(x) = 0.000000
iteration: 32
x = 8.000488
f(x) = 0.000000
Call:
nloptr(x0 = 0, eval_f = L, opts = opts)
Minimization using NLopt version 2.10.0
NLopt solver status: 4 ( NLOPT_XTOL_REACHED: Optimization stopped because
xtol_rel or xtol_abs (above) was reached. )
Number of Iterations....: 32
Termination conditions: xtol_rel: 1e-04 maxeval: 100
Number of inequality constraints: 0
Number of equality constraints: 0
Optimal value of objective function: 0
Optimal value of controls: 8Tracking the Iterations
nloptr does not return these intermediate values, but we can write some custom functions to capture them and clean them into a data.frame.
parse_optim_output <- function(text) {
# Initialize vectors to store data
iteration <- numeric()
x <- numeric()
fx <- numeric()
# Process each group of 3 lines
for(i in seq(1, length(text), 3)) {
# Extract iteration number
iter <- as.numeric(gsub("iteration: ", "", text[i]))
# Extract x value using regex
x_val <- as.numeric(gsub("\\s*\\tx = ", "", text[i+1]))
# Extract function value
f_val <- as.numeric(gsub("\\s*f\\(x\\) = ", "", text[i+2]))
# Append values
iteration <- c(iteration, iter)
x <- c(x, x_val)
fx <- c(fx, f_val)
}
# Create data.frame
data.frame(
iteration = iteration,
x = x,
fx = fx
)
}
my_nloptr <- function(...){
m <- capture.output({
o <- nloptr(...)
})
df_m <- parse_optim_output(m)
return(list(opt = o, iter = df_m))
}Tracking the Iterations
opts <- list(
"algorithm" = "NLOPT_LN_NELDERMEAD",
"xtol_rel" = 0.0001,
"maxeval" = 100,
"print_level" = 3
)
o <- my_nloptr(x0 = 0, eval_f = L, eval_grad_f = dL, opts = opts)
o$iter iteration x fx
1 1 0.000000 4.000000
2 2 1.000000 3.062500
3 3 2.000000 2.250000
4 4 3.000000 1.562500
5 5 5.000000 0.562500
6 6 7.000000 0.062500
7 7 11.000000 0.562500
8 8 9.000000 0.062500
9 9 11.000000 0.562500
10 10 8.000000 0.000000
11 11 7.000000 0.062500
12 12 8.500000 0.015625
13 13 7.500000 0.015625
14 14 8.250000 0.003906
15 15 7.750000 0.003906
16 16 8.125000 0.000977
17 17 7.875000 0.000977
18 18 8.062500 0.000244
19 19 7.937500 0.000244
20 20 8.031250 0.000061
21 21 7.968750 0.000061
22 22 8.015625 0.000015
23 23 7.984375 0.000015
24 24 8.007812 0.000004
25 25 7.992188 0.000004
26 26 8.003906 0.000001
27 27 7.996094 0.000001
28 28 8.001953 0.000000
29 29 7.998047 0.000000
30 30 8.000977 0.000000
31 31 7.999023 0.000000
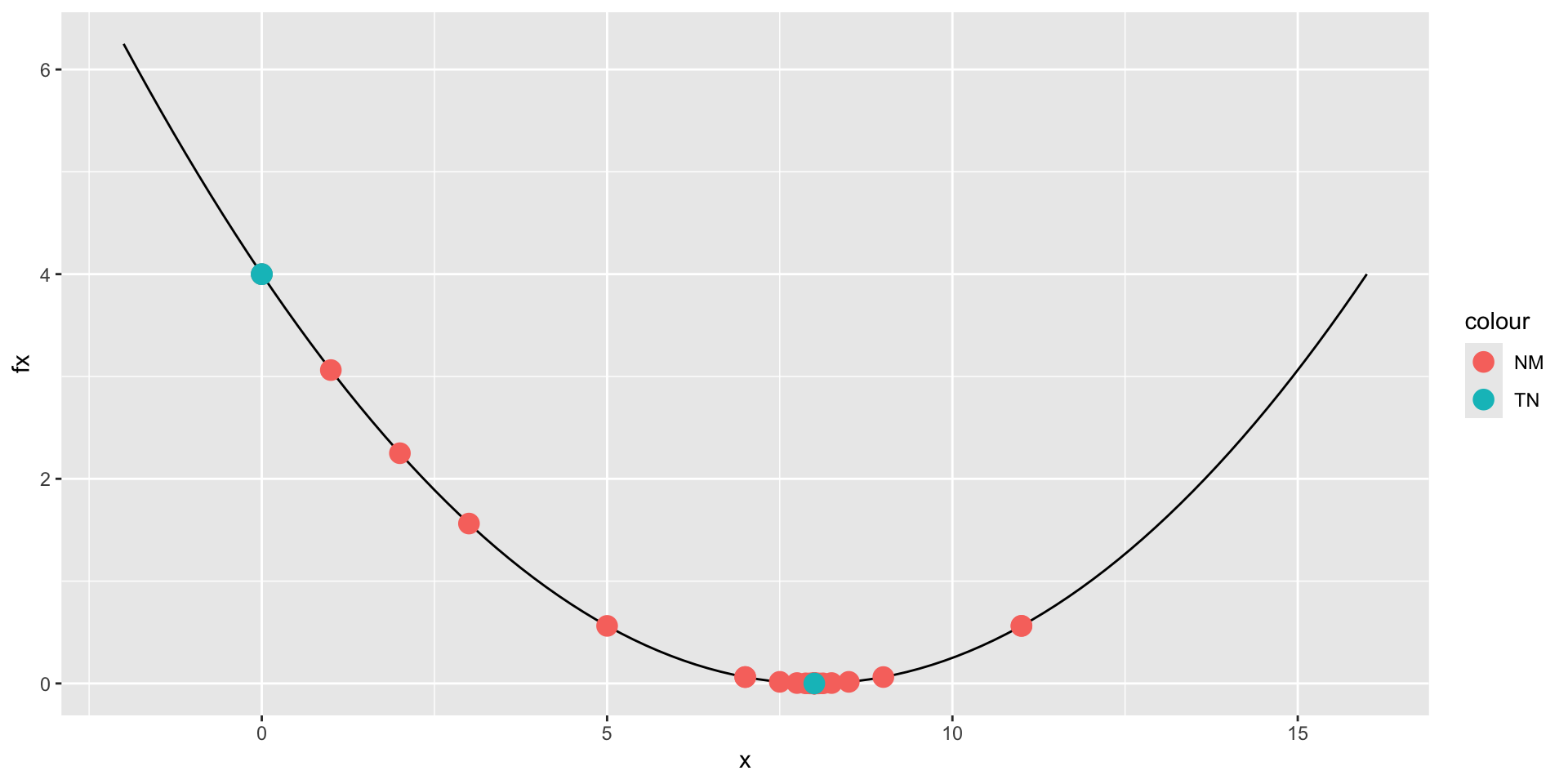
32 32 8.000488 0.000000Visualizing the Iterations
Comparing Methods
Local Minima
Let’s look at a more complicated example.
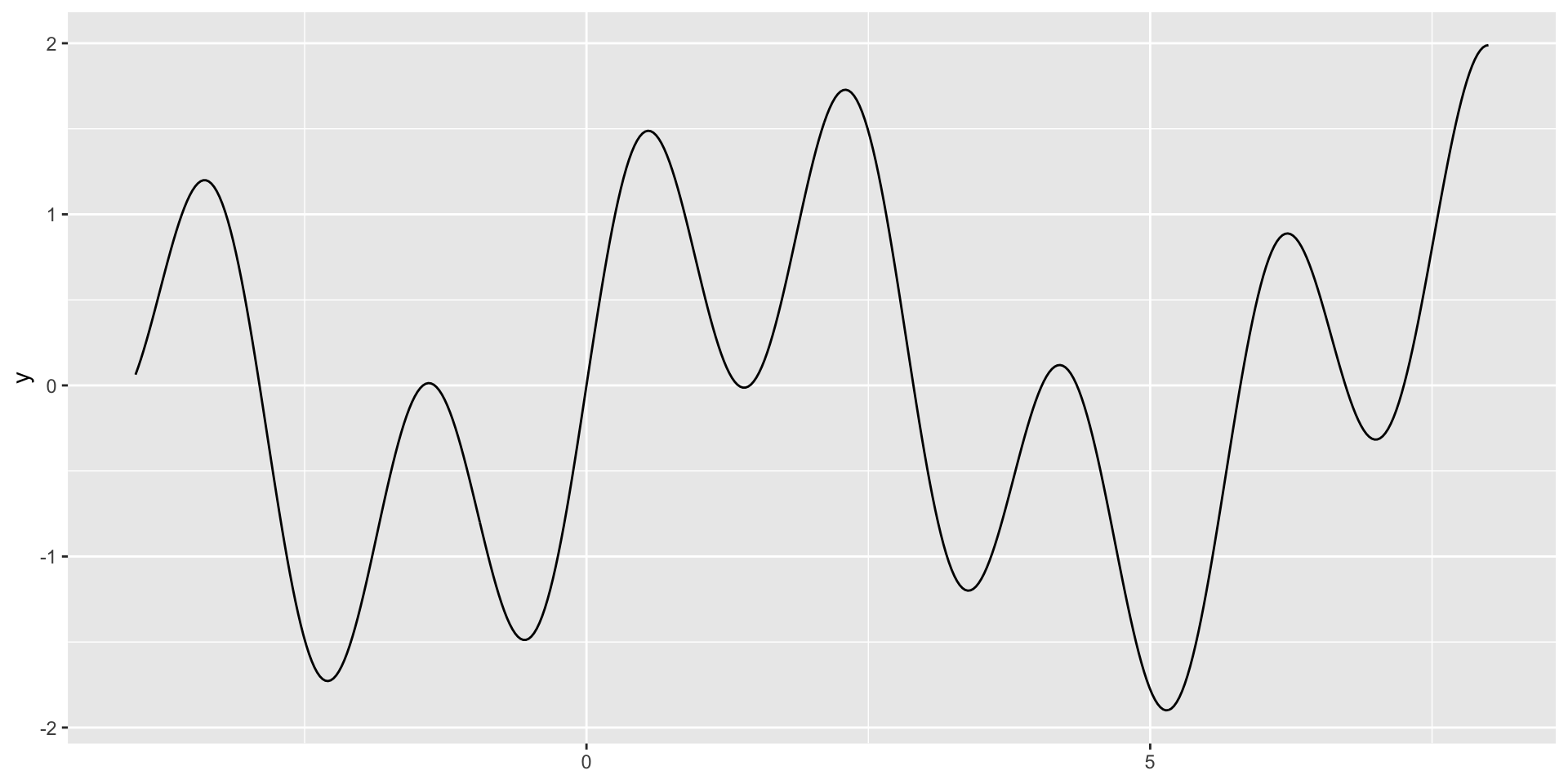
Numerical Approximation of Gradient
Again, we can use a numerical approximation of the gradient.
The argument heps is the step size for the numerical approximation.
- setting
hepsto a large value to show the difference between using the numerical and analytical gradient
Calculating Minima
opts <- list(
"algorithm" = "NLOPT_LN_NELDERMEAD",
"xtol_rel" = 0.0001,
"maxeval" = 100,
"print_level" = 3
)
o_nm <- my_nloptr(x0 = 2, eval_f = f, opts = opts)
opts <- list(
"algorithm" = "NLOPT_LD_TNEWTON",
"xtol_rel" = 0.0001,
"maxeval" = 100,
"print_level" = 3
)
o_tn <- my_nloptr(x0 = 2, eval_f = f, eval_grad_f = d, opts = opts)
opts <- list(
"algorithm" = "NLOPT_LD_TNEWTON",
"xtol_rel" = 0.0001,
"maxeval" = 100,
"print_level" = 3
)
o_tn_approx <- my_nloptr(x0 = 2, eval_f = f, eval_grad_f = d_approx, opts = opts)Comparing Methods
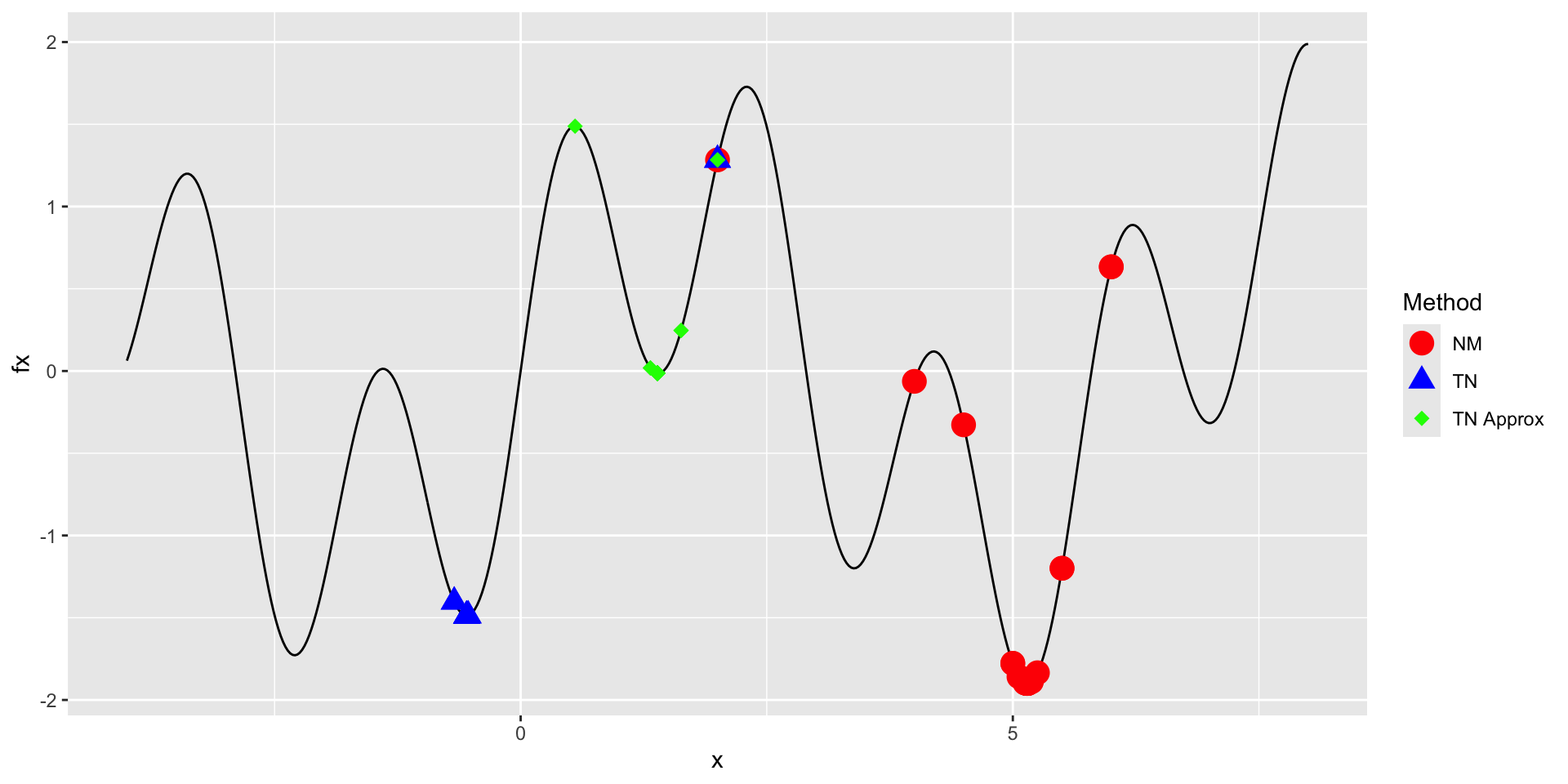
Comparing Methods
Solutions:
[[1]]
[1] 5.145508
[[2]]
[1] -0.5488825
[[3]]
[1] 1.389585Number of iterations:
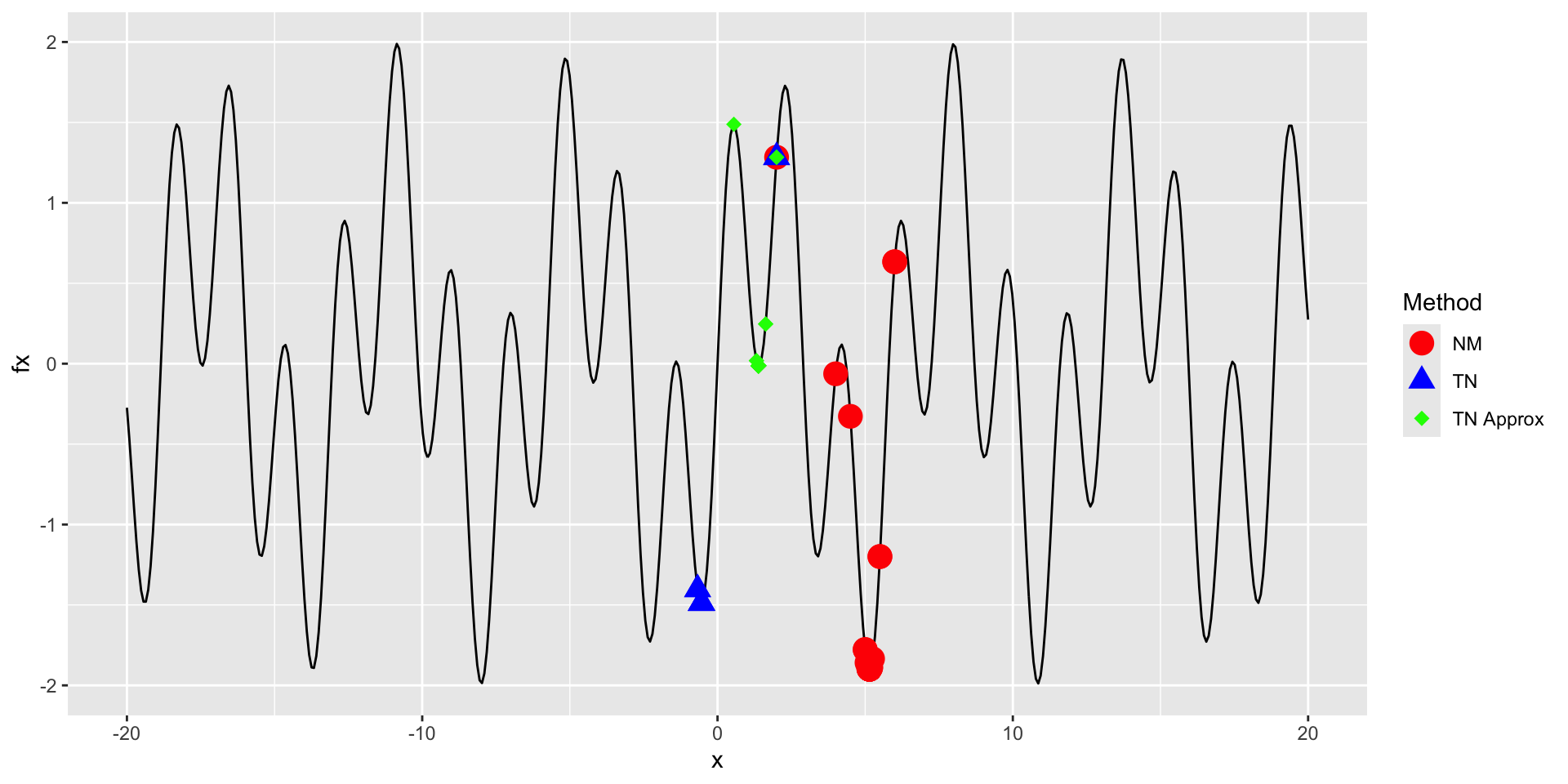
Zooming Out
All methods are finding local minima as this function is difficult to optimize.
Optimizing Over Multiple Arguments
So far we have been optimizing over a single variable.
But we can optimize over as many variables as we want.
Graph the Function
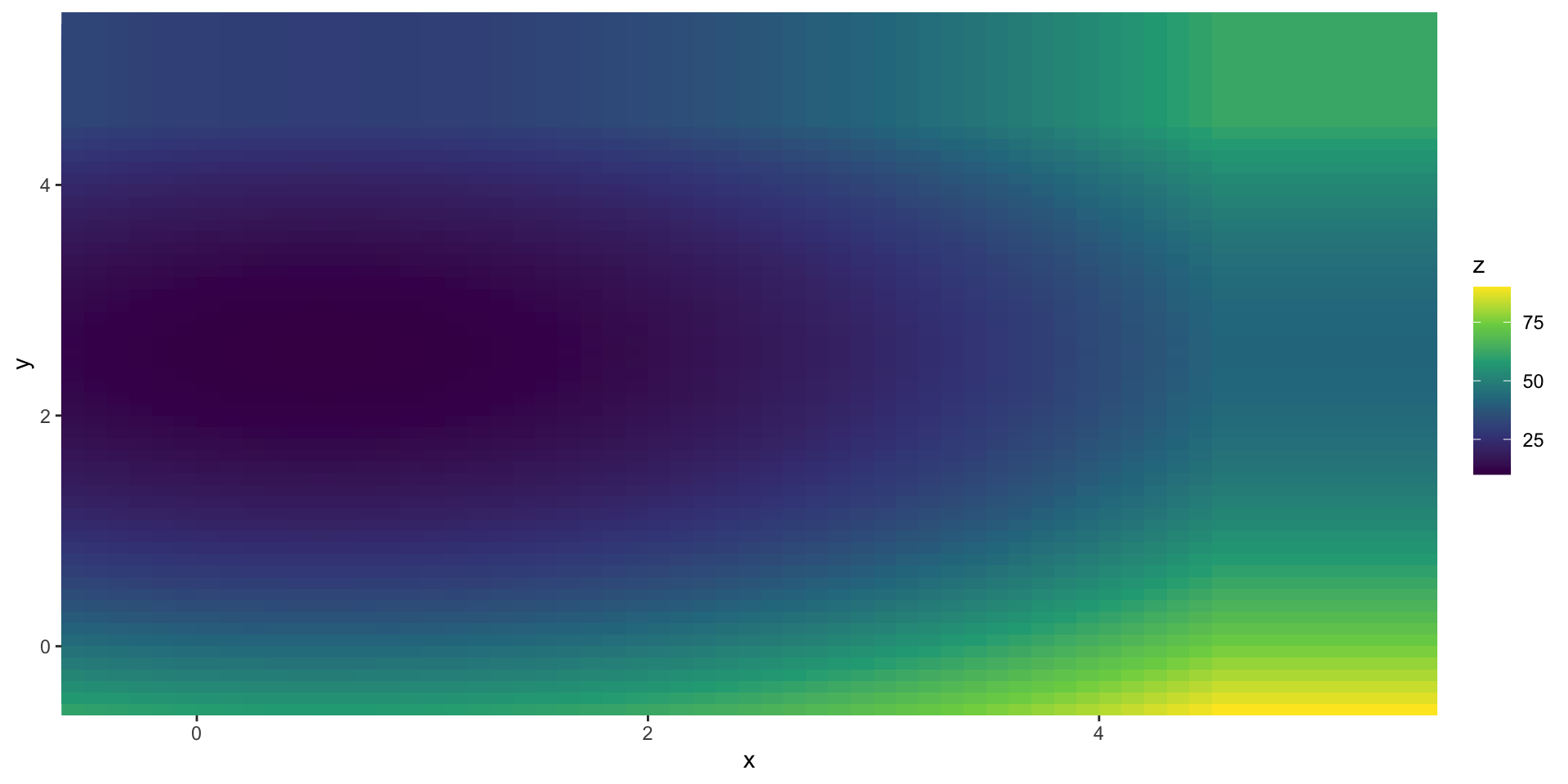
Optimizing Over Multiple Arguments
opts <- list(
"algorithm" = "NLOPT_LD_TNEWTON",
"xtol_rel" = 0.0001,
"maxeval" = 100
)
nloptr(x0 = c(2, 2), eval_f = f, eval_grad_f = d, opts = opts)
Call:
nloptr(x0 = c(2, 2), eval_f = f, eval_grad_f = d, opts = opts)
Minimization using NLopt version 2.10.0
NLopt solver status: 1 ( NLOPT_SUCCESS: Generic success return value. )
Number of Iterations....: 10
Termination conditions: xtol_rel: 1e-04 maxeval: 100
Number of inequality constraints: 0
Number of equality constraints: 0
Optimal value of objective function: 10
Optimal value of controls: 1 3Visualizing the Iterations
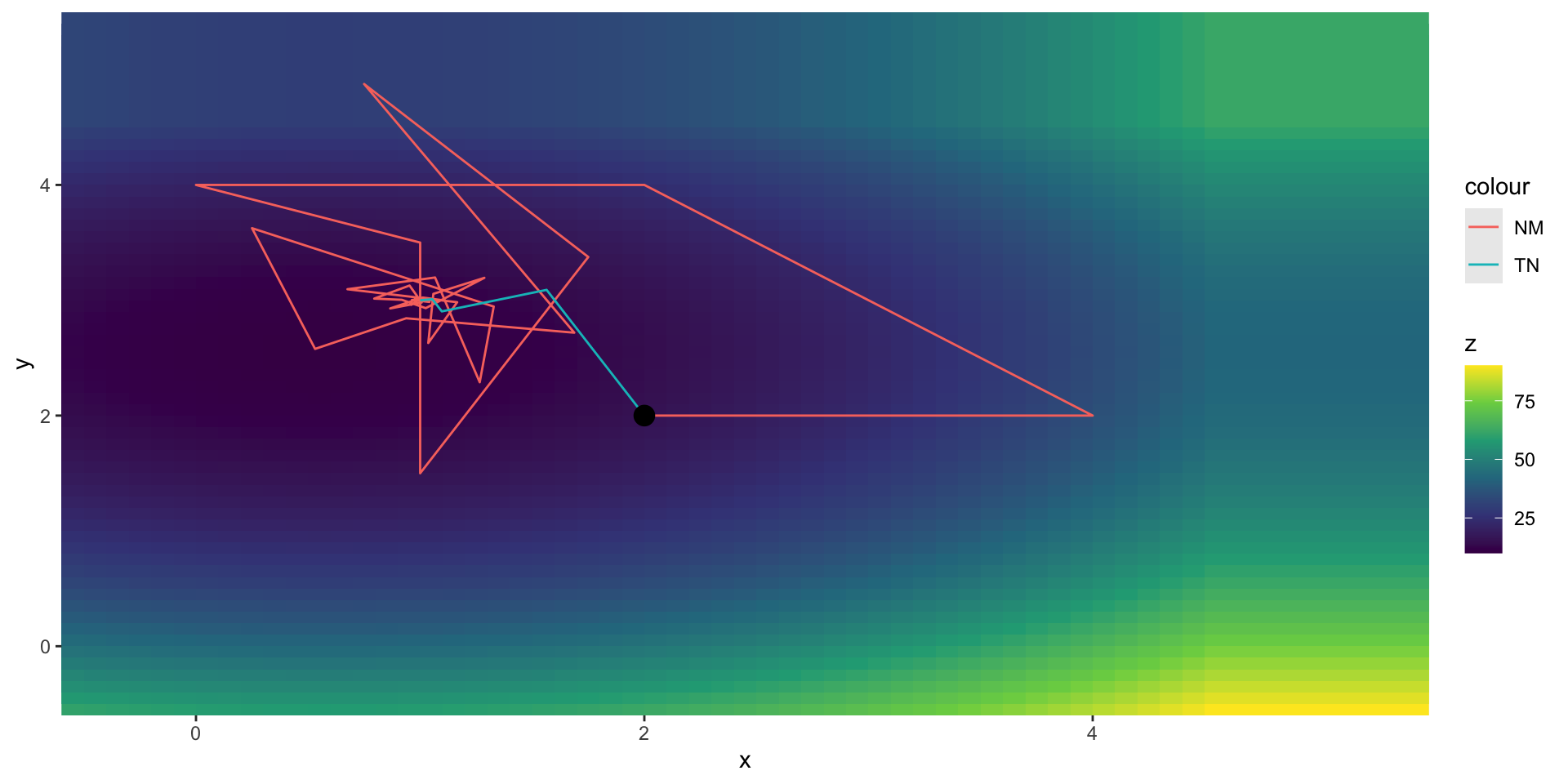
Comparing the Methods
Numerical Optimization Overview
- Grid Search
- Brute force, inefficient, good at global optima
- Gradient-free methods
- less efficient, good for non-differentiable functions
- Gradient-based methods
- more efficient, requires an analytic or numeric gradient
Solving Optimization Problems
Generally, you try to solve an optimization problem by…
Finding an analytic solution by hand
Finding an analytic solution with a Symbolic engine
Numerical optimization
- gradient-based method
- grid search
When turning to numerical optimization, the key is finding or approximating the gradient.
- automatic differentiation (AD) is another method for calculating the gradient of a function
Symbolic Optimization
What is Symbolic Optimization?
When you solve an optimization problem by hand, you apply a set of rules to find the gradient, then rearrange the FOC to find zero roots.
A symbolic engine emulates this same process.
- Mathematica is an example of a common symbolic engine
Python has a great symbolic engine called SymPy which we will take a look at.
Automatic Differentiation
What is Automatic Differentiation?
We have so far seen two ways to calculate the gradient of a function:
- Analytically (or symbollically)
- Finite differences (approximation up to some order ‘n’)
- Automatic differentiation (AD)
- a method for calculating the derivative of a function using the chain rule
AD Chain Rule
\[ \begin{align*} y &= f(g(h(x))) = f(g(h(w_0))) = f(g(w_1)) = f(w_2) \\ w_0 &= x \\ w_1 &= h(w_0) \\ w_2 &= g(w_1) \\ w_3 &= f(w_2) = y \\ \frac{dy}{dx} &= \frac{dy}{dw_2} \cdot \frac{dw_2}{dw_1} \cdot \frac{dw_1}{dx} \\ &= \frac{df(w_2)}{dw_2} \cdot \frac{dg(w_1)}{dw_1} \cdot \frac{dh(w_0)}{dw_0} \end{align*} \]
The “trick” of AD is that we can build up complicated composite functions as a series of partial derivatives of each step.
Forward vs. Reverse Mode AD
\[ \frac{dy}{dx} = \frac{dy}{dw_2} \cdot \frac{dw_2}{dw_1} \cdot \frac{dw_1}{dx} \]
Forward AD calculates:
- \(\frac{dw_1}{dx}\) then \(\frac{dw_2}{dw_1}\) then \(\frac{dy}{dw_2}\)
Reverse AD calculates:
- \(\frac{dy}{dw_2}\) then \(\frac{dw_2}{dw_1}\) then \(\frac{dw_1}{dx}\)
Forward vs. Reverse Mode AD
Given a function \(f: \mathbb{R}^n \to \mathbb{R}^m\)
- if \(n << m\), then forward mode is more efficient
- if \(n >> m\), then reverse mode is more efficient
For a loss function, \(f: \mathbb{R}^n \to \mathbb{R}\), so reverse mode is more efficient.
A Simple AD example
\[ \begin{align*} f(x_1, x_2) &= x_1 x_2 + sin(x_1) \\ &= w_1 + w_2 \\ &= w_3 \\ \frac{dy}{dx} &= \frac{dw_3}{dw_1} \cdot \frac{dw_1}{dx} + \frac{dw_3}{dw_2} \cdot \frac{dw_2}{dx} \end{align*} \]
In this example, each step is easy to calculate:
\[ \frac{dy}{dx} = \underbrace{\frac{dw_3}{dw_1}}_{1} \cdot \underbrace{\frac{dw_1}{dx}}_{x_1 + x_2} + \underbrace{\frac{dw_3}{dw_2}}_{1} \cdot \underbrace{\frac{dw_2}{dx}}_{cos(x_1)} \]
Because this problem was simple, when we follow the AD chain rule, we derive the symbolic solution.
AD vs. Symbolic Differentiation
AD, however, can be used in many cases where symbolic differentiation is not possible.
Automatic Differentiation is usually calculated only for a single point at a time, not for the entire function.
This means it can handle functions that
- are not differentiable everywhere
- cannot be “written down”
- are not continuous
AD does require that a function can be written programmatically/algorithmically.
AD in Machine Learning
Automatic Differeneiation is the key step behind fitting large neural networks.
Neural networks have the following features/goals:
- A loss function with many paramaeters: \(f: \mathbb{R}^n \to \mathbb{R}\)
- Can be written programmatically, but not symbolically
- Cares about precision and efficiency
- But doesn’t care about a closed-form expression of the gradient
More AD Resources
- What’s Automatic Differentiation? by Andrew Holmes
- Automatic Differentation Wikipedia
- Automatic Differentation JAX Python Documentation
Summary
Lecture Summary
- Optimization
- Analytic
- Programmatic
- Symbolic
- Numeric
- Grid Search
- Gradient-free
- Gradient-based
- Automatic Differentiation
Live Coding Example
Python
SympyCoding Example (symoblic)Python
JAXCoding Example (automatic differentiation)